|
Waypoint® Inertial Explorer™
Inertial Explorer (GPSIMU)後處理軟體套件的目標是希望集成來自6自由度IMU感測器的速度資料和通過Waypoint GrafNav(包含在套件中)處理的GPS資訊的用戶。Waypoint Inertial Explorer的設計使其可以從多種IMU,包括高精度導航級到便宜的MEMS(微電機系統)各種感測器類型,利用捷聯加速度計(Dn)和角速度(Dq)資訊產生高速率座標和姿態資訊。 Waypoint Inertial Explorer在人們熟悉的Waypoint GrafNav處理環境中運行,使用同樣的繪圖工具進行資料分析。這提供給Waypoint Inertial Explorer以與GrafNav同樣的全部特性。Waypoint Inertial Explorer可以兩種方式將GNSS和IMU資料結合。在松耦合處理中,GPS資料先被處理,並將最優的位置、速度和品質資訊存儲在標準的Waypoint GrafNav fwd/rev/cmb檔中。隨後,Inertial Explorer的IMU模組將被調用以進行校準、將測量值機器化並濾波。GPS座標和速度將通過時間匹配和加入與GPS測量曆元最接近的慣導速率資料進行更新。松耦合處理可用於露天測繪,包括機載應用,如LIDAR和攝影測繪。 在緊耦合模式下,GNSS和IMU資料被同時處理。緊耦合處理的好處是即使在兩顆衛星可用時也可以使用相位變化量限制慣導誤差的增長,這也可以通過自動ZUPT檢測實現。緊耦合處理可用於弱信號跟蹤環境下,如城市環境中的地面車輛測量。 用戶需要在資料收集過程中將每組慣導測量值打上GPS時間標籤。NovAtel的SPAN技術提供這種能力。更多有關SPAN的資訊請見這裏。Waypoint Inertial Explorer的主要目標是SPAN用戶或那些希望製造自己的GPS/慣導硬體平臺並在產品級軟體環境中處理這些資料的用戶。其目標不是替換已經存在的非常優秀的商業級GPS/慣導系統。 For more information on SPAN, click here. 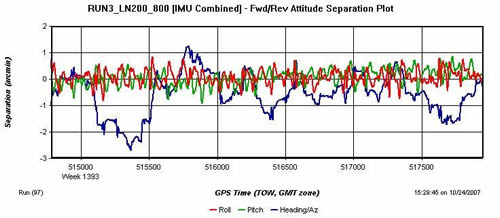 Figure 1 Forward/Reverse attitude separation (LN200) 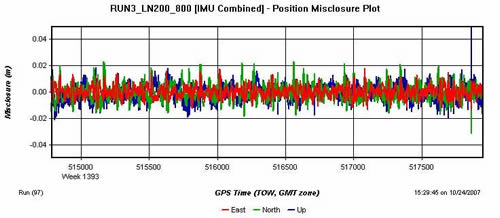
Figure 2 GPS-IMU position difference (LN200) |
||||||||||||||||