|
RTKNav/RtDLL: GPS Real-Time Kinematic SoftwareRTKNavMany applications require high position, velocity and/or attitude accuracies in real-time. In some cases, position accuracies as high as a few centimetres are required. RTKNav, Waypoint's real-time kinematic GPS processing program, can be used to meet these requirements. RTKNav computes accurate position, velocity and attitude under the Windows 2000 and XP environments (not recommended for Win 9x or NT platforms). RTKNav also displays windows that update satellite data, solution data, processing, and receiver status at every epoch. A plot of the master station and its remotes can also be viewed and modified to focus on a specific receiver. Moreover, RTKNav has many features not available in the RTK software embedded within a particular GPS receiver. Such features include: multi-remote processing (up to 20 remotes), moving baseline processing, azimuth and heading determination, 3D attitude determination, single and dual frequency OTF and a flexible control over processing modes. RTKNav also supports a number of GPS receivers, which can be mixed and matched in your applications. Such receivers include Ashtech, Canadian Marconi, NavSymm, NovAtel and Javad/Topcon. RTCM types 3, 18 and 19 are supported in addition to Waypoint's proprietary radio transmission records. The following report describes how RTKNav was used to process data from GPS equiped sonobuoys in the calibration of underwater sonar systems. This report is provided here with the kind permission of Gregory J. Baker of the Defense Research Establishment and Hermes Electronics Inc. Tracking Sonobuoy's with RTKNav (PDF - 112KB) Figure 1: RTKNav interface RtDLLRtDLL is the GPS computational receiver called from RTKNav, and can be purchased from Waypoint Consulting. GPS integrators using Windows 2000 or XP could then add this capability to their own GPS post-processing software. These processing capabilities are made available via a 32-bit Windows Dynamic Link Library (DLL). Such features include centimetre processing, Kinematic Ambiguity Resolution (KAR) which is Waypoint's proprietary OTF algorithm, full dual frequency capabilities and excellent bad data handling. Fast processing means that RtDLL can keep up with high data rates. AccuracyAccuracies obtained by RTKNav and RtDLL are the same, and depend very much on the environment. Under good open conditions, accuracies of 1 cm + 2ppm can be achieved very easily. This requires a KAR initialization, which usually requires 1-2 minutes with dual frequency and 8-25 minutes with single frequency. Floating ambiguity modes are also available, and accuracies achieved under these conditions usually range from 10-30 cm. After a loss of lock accuracies will degrade to that of DGPS, but will improve very quickly via the carrier phase signal. Azimuth determination accuracies depend on the separation between antennae. With a 2-metre separation, 0.5 -1.0 degree accuracies are typical. Ship to Buoy PositioningFor many marine applications such as Seismic, Ocean Research and Military, the relative distance between the ship and one or more buoys is often required. For such an application, RTKNav/RtDLL are both proven and well suited. RTKNav/RtDLL's carrier phase processing capabilities mean that accuracies attained are much higher than more traditional code-only processing techniques. Moreover, all processing can be performed using one central processing computer on the ship.
Azimuth DeterminationGPS has been shown to be well suited for azimuth determination. Waypoint's robust and fast azimuth determination algorithm works in either static situations like tank and gun pointing or kinematic environments like aircraft or ship heading determination. Combining the software with a low cost GPS receiver, an inexpensive attitude determination system is formed.
3D AttitudeGPS based attitude determination techniques can be much less expensive than inertial based techniques. Moreover, they do not have the susceptibility to magnetic disturbances and vehicle dynamics that slaved attitude determination systems have. RTKNav/RtDll can compute roll, pitch and heading from 3 or more fix-mounted antennae. Included pre-calibration software ensures that the body coordinate frame is easily defined.
Centimetre RTKUsing RTKNav or RtDLL combined with dual frequency GPS equipment; accuracies of a few centimetres can be obtained in a matter of minutes. This can be beneficial for applications such as construction, land surveying, marine dredging and subsidence monitoring. Waypoint's KAR algorithm facilitates such fast centimetre accuracy resolution in both static and kinematic modes. Robustness is also very important, and Waypoint Consulting Inc. has put much effort in ensuring that our algorithms are very reliable.
Air to Air Position and VelocitySome applications require the relative position and velocity vector between two aircraft. Examples of such applications are air-to-air refueling, projectile tracking, aircraft testing and helicopter-to-balloon tracking. The relatively short vector between the airborne objects makes such positioning superior to correction techniques using a fixed ground station, which is often very far away.
Air to Air RefuelingThe figure below shows a real-time "moving baseline" scenario, where the tanker aircraft acts as the base station and the approaching aircraft is the remote station. Under these conditions, the item of interest is the relative vector between the tanker and approaching aircraft, providing an optimal position to complete the refueling operation. Other similar applications exist in the marine industry.
Real-Time Moving Baseline Test Procedure The graph below displays the absolute accuracy of the refueling process given complete loss of lock at two places in an actual tanker-refueling test.
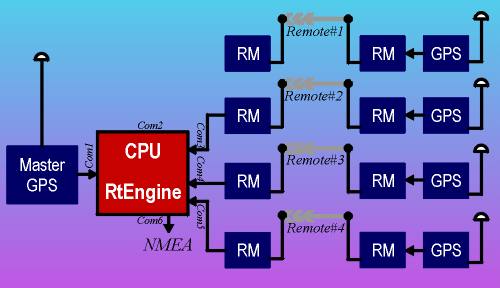
Real-Time Moving Baseline Test Results RTKNav System SetupRTKNav and RtDLL can be configured with as many as 20 remotes. The Figure on the right shows RTKNav configured with 4 remotes. In this configuration, each remote has its own transmission frequency and radio-modem (RM) pair. This allows for very high data rates. Other configurations are possible that use shared frequencies. The separation of remote data into individual serial streams must be performed external to RTKNav. Corrected position information is exported in a NMEA message format that can be processed or plotted.
|